Сообщение Дрон для контактного обследования объектов строительства появились сначала на База роботов и ИИ в России.
]]>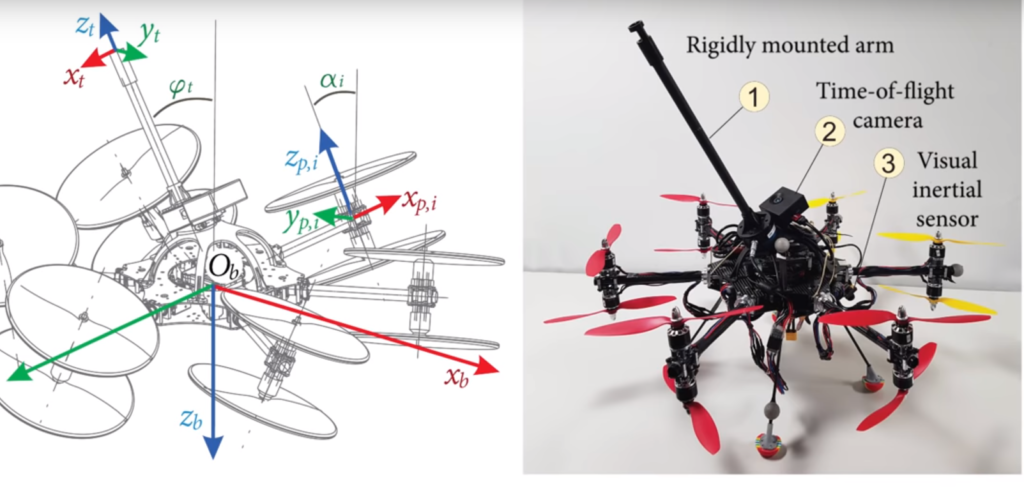 Главный недостаток существующих дронов — неустойчивость при приложении силы в плоскости, параллельной винтам. Но додекакоптер, созданный инженерами Швейцарской высшей технической школы Цюриха, способен сохранять устойчивость и прикладывать определенные усилия к поверхности различными способами. Такой баланс достигается благодаря сдвоенным роторам (всего их 12) на поворотных плечах, расположенных на каждом конце рамы гексакоптера. Это позволяет беспилотнику менять вектор тяги каждой пары роторов независимо от остальных.
Главный недостаток существующих дронов — неустойчивость при приложении силы в плоскости, параллельной винтам. Но додекакоптер, созданный инженерами Швейцарской высшей технической школы Цюриха, способен сохранять устойчивость и прикладывать определенные усилия к поверхности различными способами. Такой баланс достигается благодаря сдвоенным роторам (всего их 12) на поворотных плечах, расположенных на каждом конце рамы гексакоптера. Это позволяет беспилотнику менять вектор тяги каждой пары роторов независимо от остальных.
Для взаимодействия с поверхностями и объектами на дроне установлено отдельное плечо. Оно может заканчиваться эффектором, колесом для обследования поверхностей, маркером для нанесения меток или различными датчиками. Во время тестов мультикоптер в том числе обследовал стены методом электрического потенциала, выявляя ржавую арматуру.
Сообщение Дрон для контактного обследования объектов строительства появились сначала на База роботов и ИИ в России.
]]>